LLM Graph Chat LLM Graph Chat
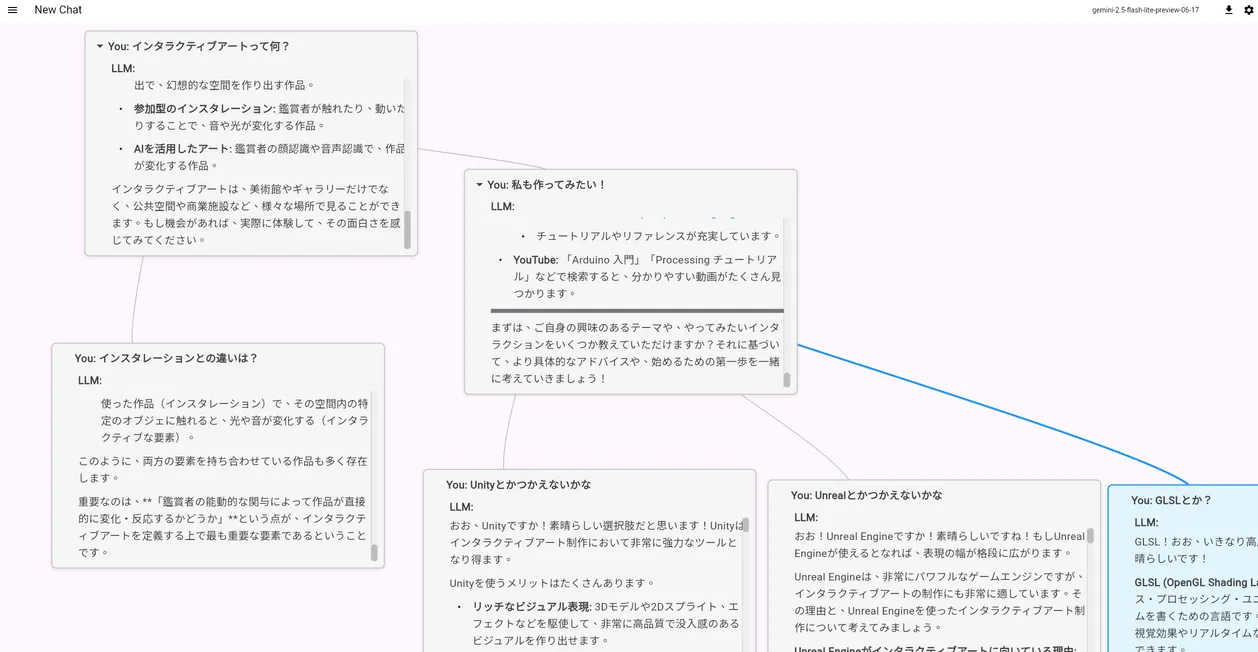
LLMとの会話を木構造で分岐させるUI。従来のチャット形式のシーケンシャルな制約を打破し、並列に複数の話題を探索できる。FlutterでWebアプリとして公開。
プログラミング、電子工作、テクノ・ハウス音楽
LLMとの会話を木構造で分岐させるUI。従来のチャット形式のシーケンシャルな制約を打破し、並列に複数の話題を探索できる。FlutterでWebアプリとして公開。

電脳サークルのスノーボード体感ゲーム「RealBoard」の制御システムを刷新。ESP32 Bluetoothによるバランスボード接続、加速度センサーによる角度検知でコンパクト化・信頼性向上を実現した。

GDGoC TUATとステージ研究会の合同展示。来場者が入力した文章を埋め込みベクトル化し、4次元空間で回転・3次元に射影することで「言葉のスペースのプラネタリウム」を表現。

Open Hack U 2024 TOKYOで作成した空中ジェスチャー入力デバイス。赤外線距離センサで手の動きを検出し、ESP32上でTensorFlow Lite for Microcontrollersによるリアルタイム推論でジェスチャーを認識する。

大学の基礎実験で画像認識による高精度振り子測定を実施。レーザー加工機でMDF材の台座を製作、ArUCoマーカーとハフ変換で糸の角度を取得。指数減衰まで観測できた。
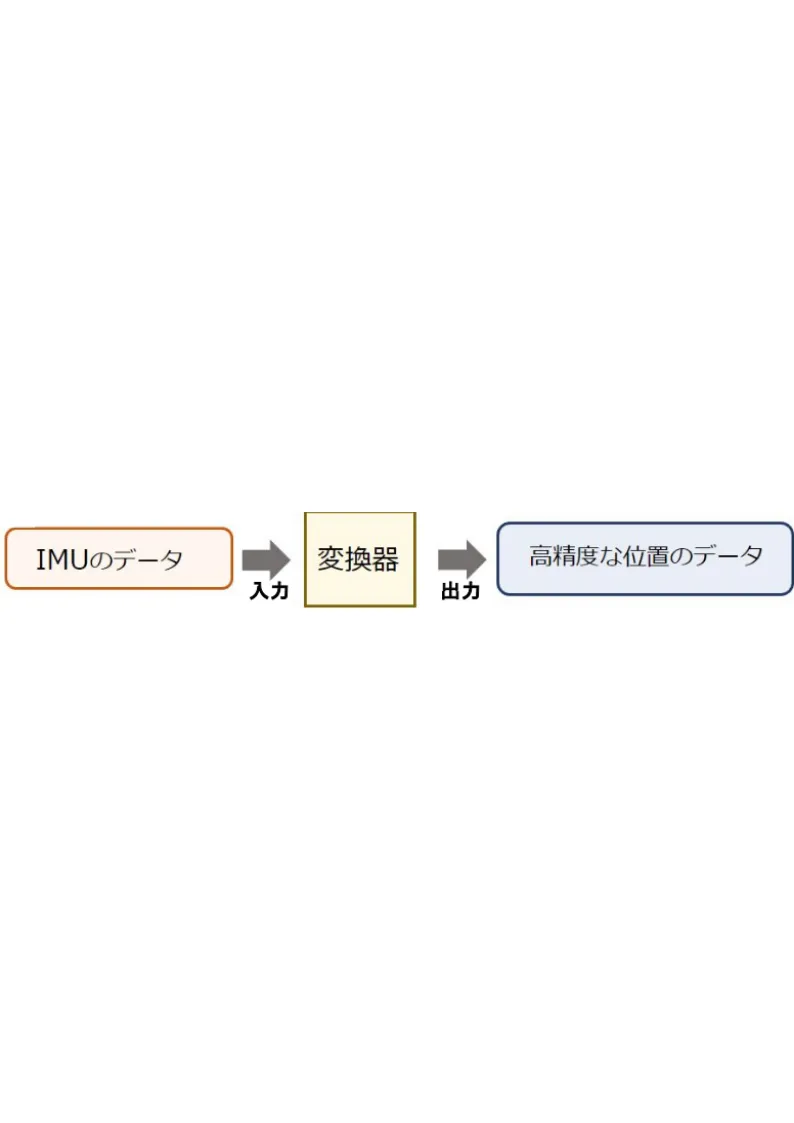
VR技術の普及を目指し、IMU(慣性計測ユニット)のみで高精度な位置推定を行う研究。Transformerモデルを用いてIMUの時系列データを位置データに翻訳するアプローチをとった。
ATE 0.17944m を達成。二重積分によるドリフトが発生せず全体の傾向を捉えることに成功。
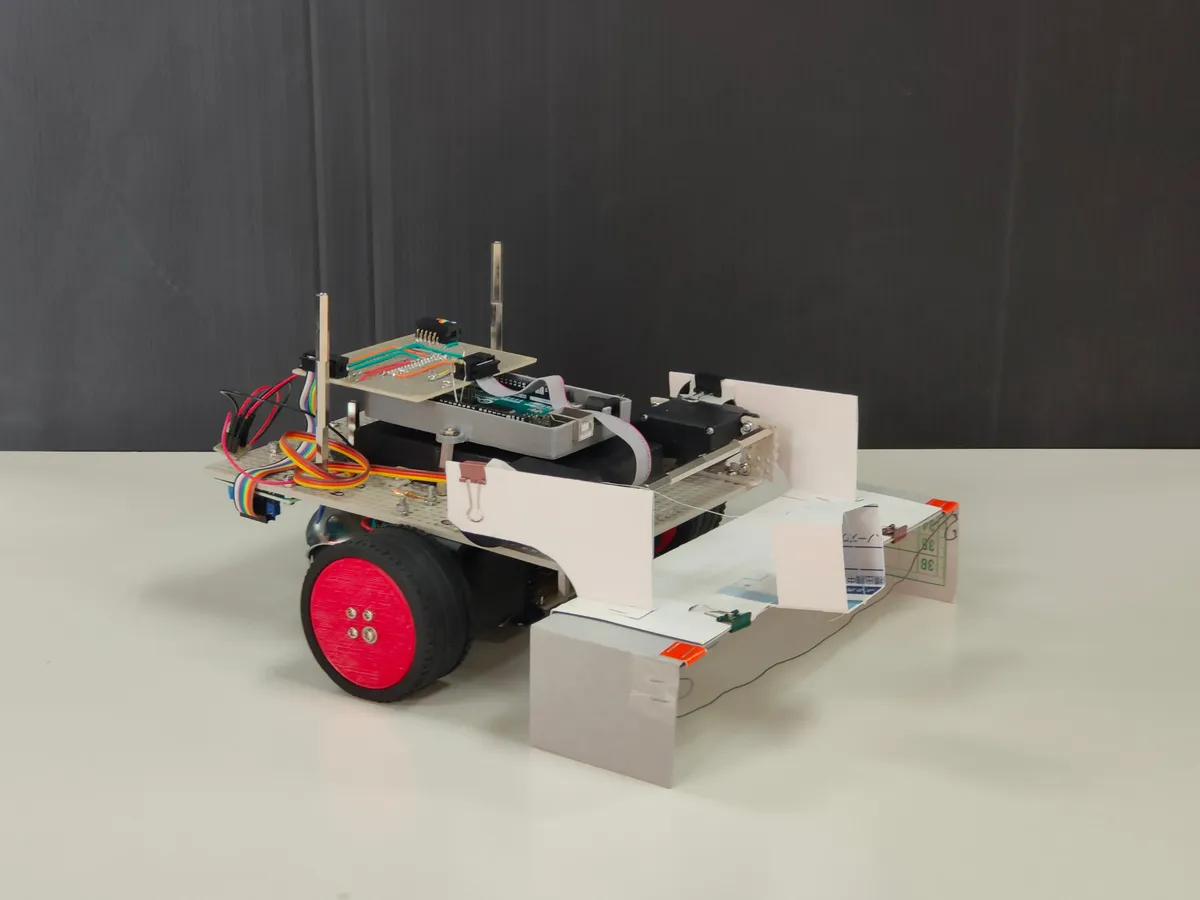
東工大附属高校マイコン制御部にてRoboCupJuniorレスキューリーグに出場。ステッピングモーター・3Dプリンタ製タイヤ・カラーセンサなどを搭載したロボットを製作。倒立振子ロボットも文化祭で展示。